Current Research
My research is centered around networked systems and control. The current projects in my lab are centered around following problems
- Mobile sensors deployment with the focus on persistent monitoring and long term autonomy
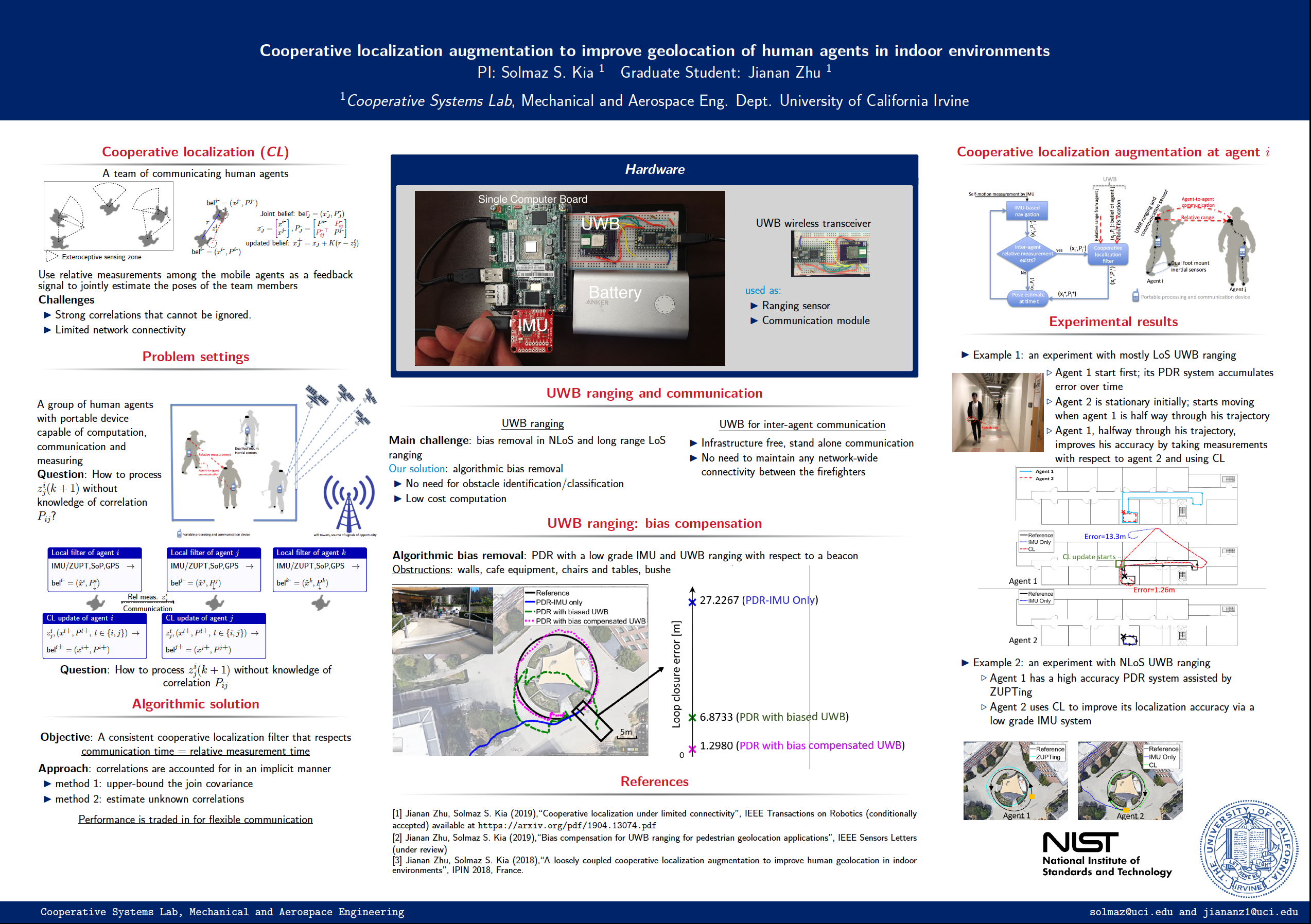
- Distributed localization algorithms for networked mobile agents with the focus on human geolicalization,
- Time delayed systems
- Control theoretic approaches for distributed optimization algorithm design
- Privacy preservation in networked systems
- Formantion and coordination problems for networked mobile agents
- Object localization using passive RFID systems
Current Sponsored Projects
- NSF-SAS: Cognitive and Reflective Monitoring Systems for Urban Environments (Jan. 2018-Dec. 2020)
- NSF-CAREER: Control Theoretic Approaches for Dynamic and Privacy Preserving Distributed Optimization Algorithms (Mar. 2017-Feb. 2022)
- NIST: Ultimate Navigation Chip (uNavChip): Chip-Scale Personal Navigation System Integrating Deterministic Localization and Probabilistic Signals of Opportunity (Jun. 2017-Jun. 2020)
Robo-KCS-Lab
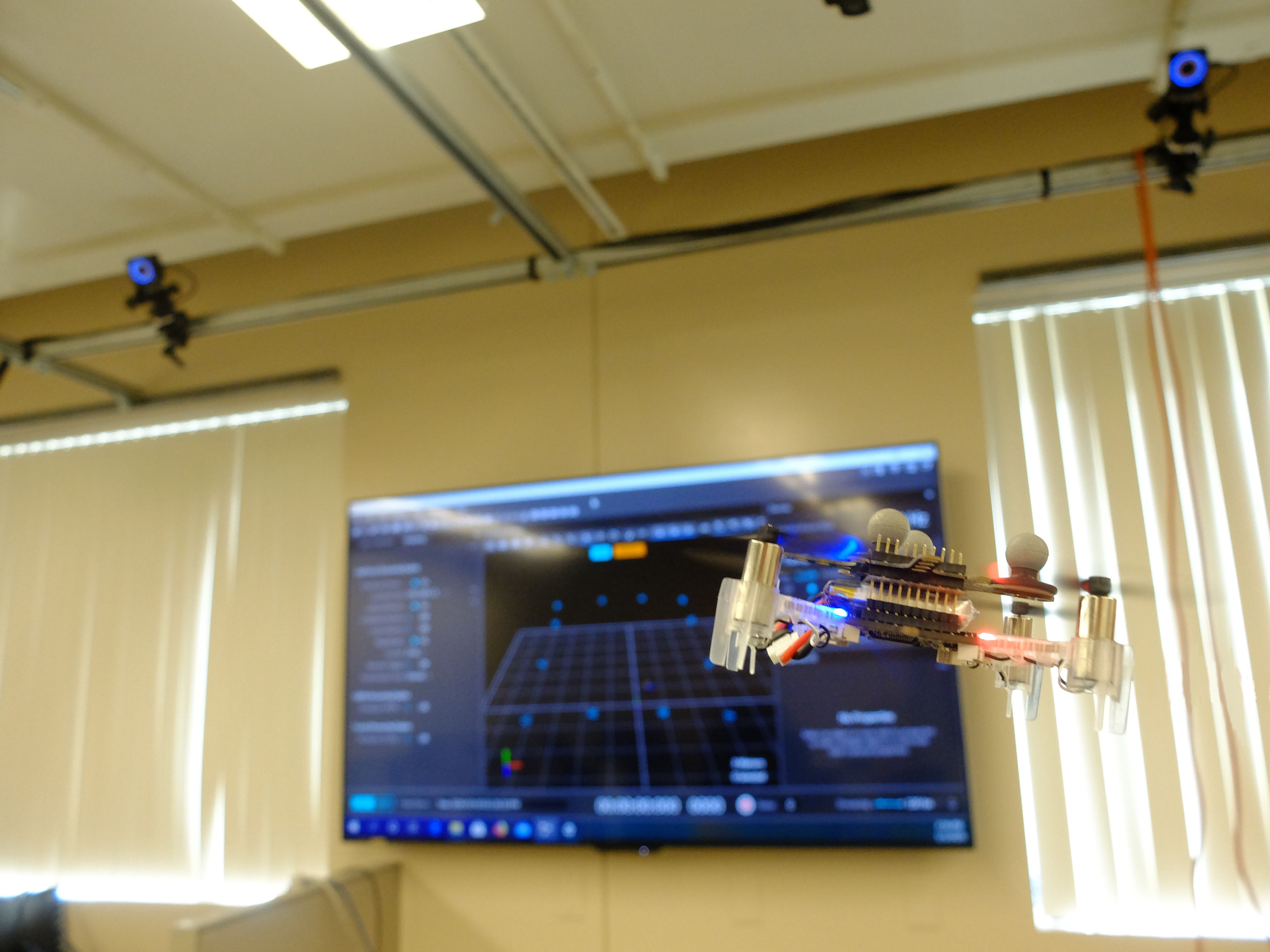
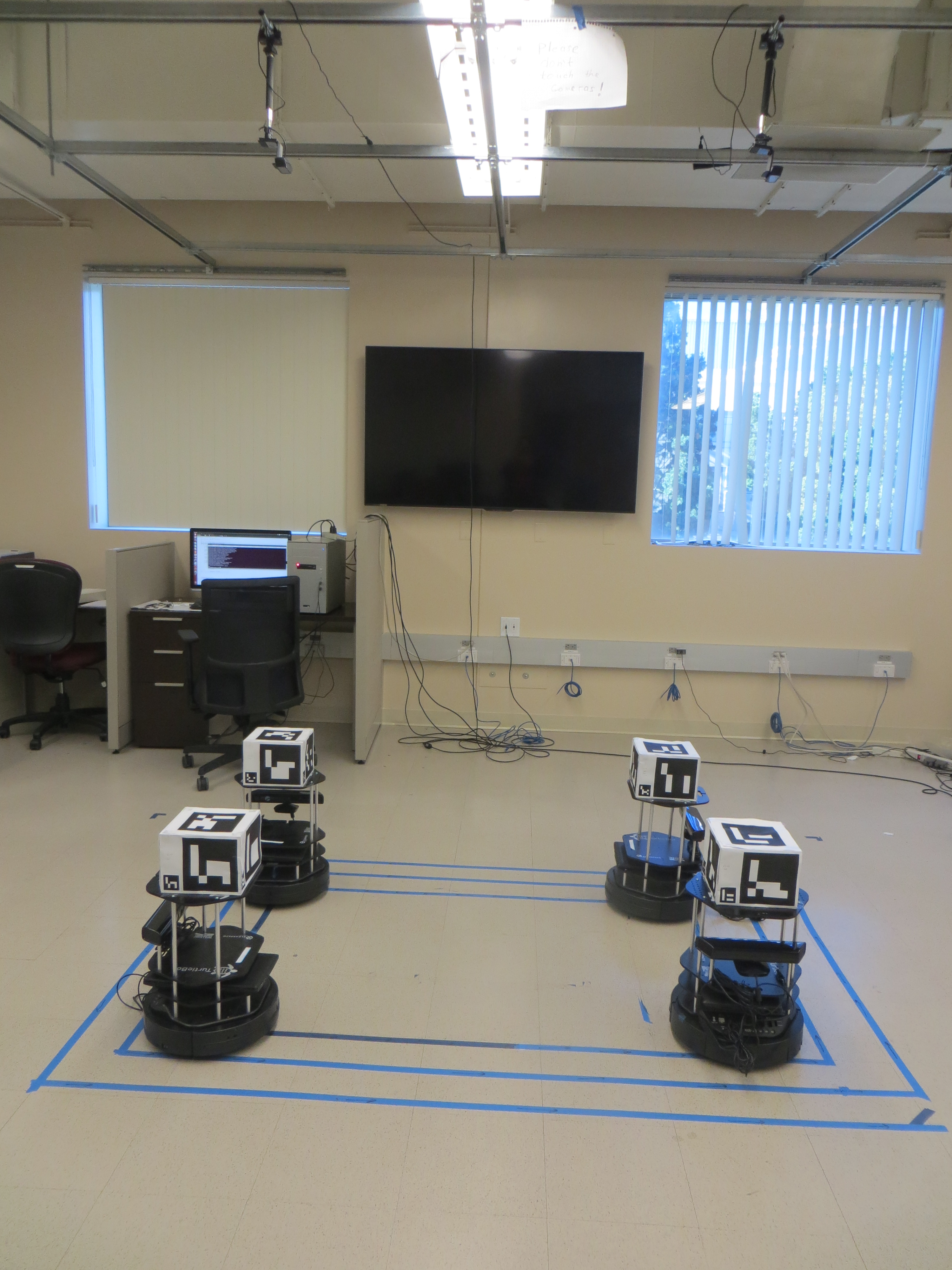 Robotic Lab: our robotic test bed consists of 5 Turtlebot robots, several quadcopters, motion capture
camera system, and RFID tags and antenna and ultra wideband ranging sensors. We use our robotic test bed to
test and evaluate our distributed algorithms for mobile agents. Our lab is also engaged in RFID tag
localization and target detection experiments. Our testbeds run on Robotic Operating System (ROS) software,
which is a framework for robot software development, providing operating system-like functionality on a
heterogeneous computer cluster. If you are interested in working in my robotic lab (high school students,
undergraduates and graduate students), please contact me at solmaz@uci.edu.
Robotic Lab: our robotic test bed consists of 5 Turtlebot robots, several quadcopters, motion capture
camera system, and RFID tags and antenna and ultra wideband ranging sensors. We use our robotic test bed to
test and evaluate our distributed algorithms for mobile agents. Our lab is also engaged in RFID tag
localization and target detection experiments. Our testbeds run on Robotic Operating System (ROS) software,
which is a framework for robot software development, providing operating system-like functionality on a
heterogeneous computer cluster. If you are interested in working in my robotic lab (high school students,
undergraduates and graduate students), please contact me at solmaz@uci.edu.